
光造形 3Dプリンター「ELEGOO MARS PRO」を使って、1/144 モビルダイバーシステム ゼーゴックを作っていきます。今回は各種センサー部分を満載している右腕を印刷していきます。
 maggothandwpmaster
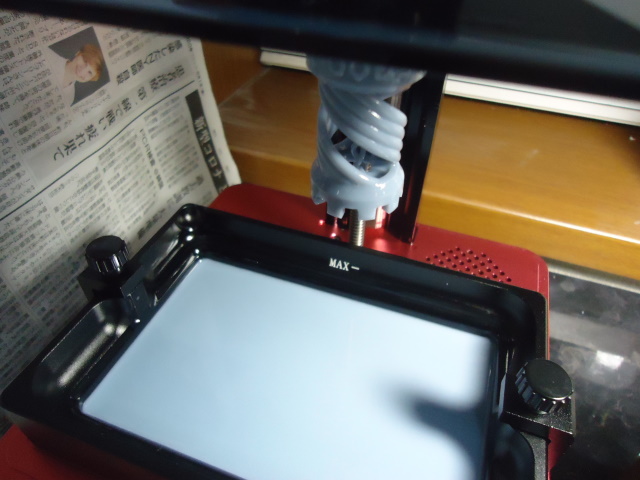
maggothandwpmaster光造形 3Dプリンター ELEGOO MARS PRO
フィラメントのPLA樹脂などを利用する3Dプリンターが有名ですが、ELEGOO MARS PROは紫外線硬化するレジンを使って、造形物を印刷するプリンターです。PLA樹脂を使うプリンターよりも細かな造形ができるので、練習材料に機動戦士ガンダム MS IGLOOで登場する「モビルダイバー ゼーゴック」を製作していきます。


右腕の試作
今回も設計は「DesignSpark Mechanical」を使っていきます。今回は、サイズも分からないので、HGズゴックの腕の長さを頼りに現物合わせで作っていきます。
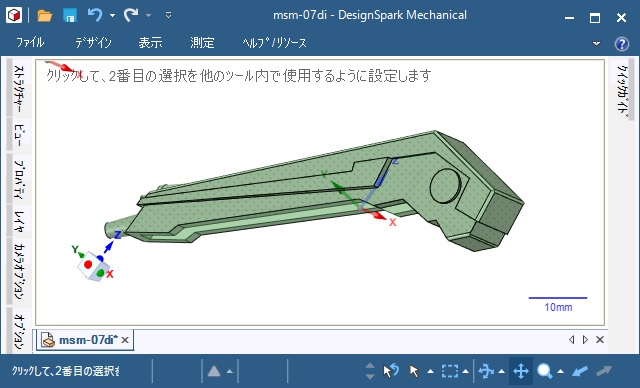
長さ(HGズゴックの右腕約8センチ)を参考にして、適当なデザインを描いて印刷します。
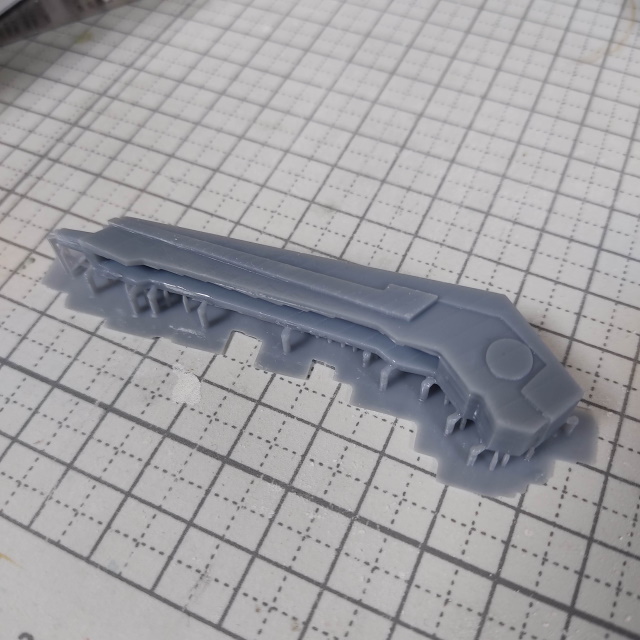
なるべく速く印刷したいので、仕上がりは無視して高さが低くなるような向きにして肉抜きを多めにして材料を節約します。
先回、仮組みしたHGズゴックの上半身に合わせて長さを確認します。

長さ的には良い感じで作ることができましたが、デザイン的にはかなり細身になってしまったので、デザインを詰めていきます。
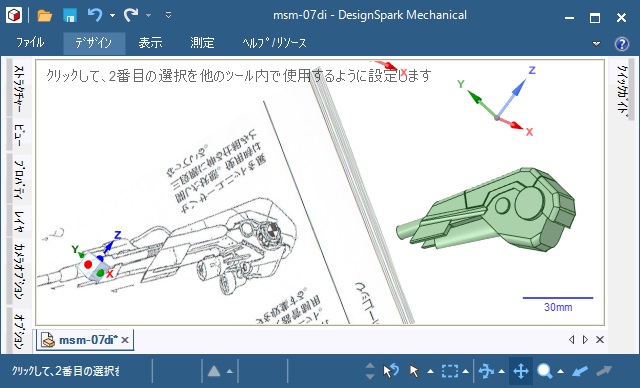
「DesignSpark Mechanical」には画像ファイルを読み込ませる機能があるので、設定資料をスキャンした画像を追加して、試作したデザインのサイズに合うように、画像を調整していきます。
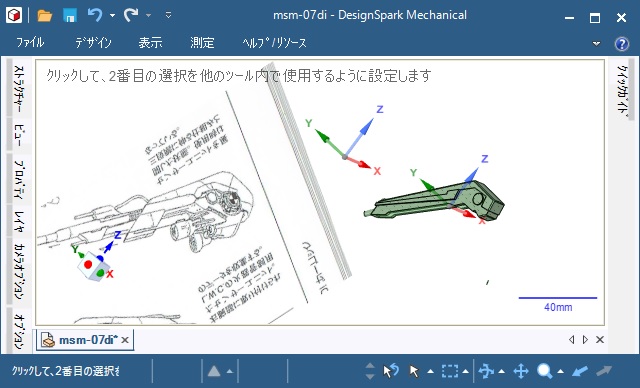
資料を見ながら、デザインを修正していきます。
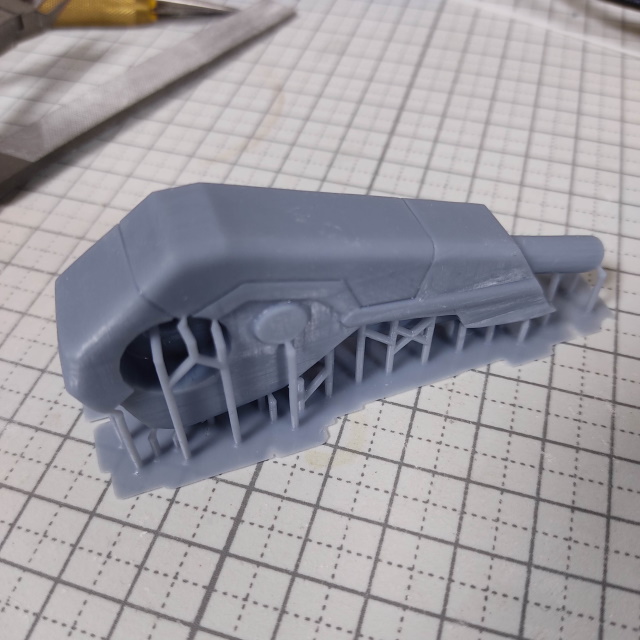
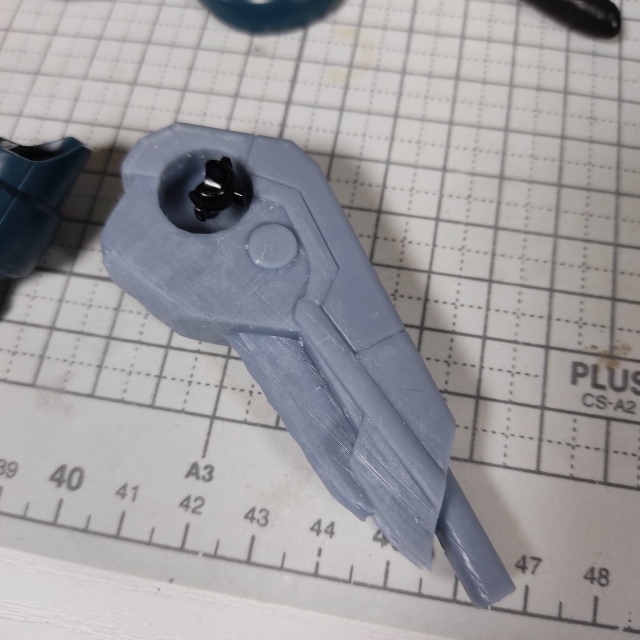
後は「ELEGOO MARS PRO」で印刷。大きさ的にもデザイン的にも設定に近い造形物を作ることができました。

HGズゴックと接続する部分は干渉しないように、大きく穴を開けてあります。
腕関節を流用して固定
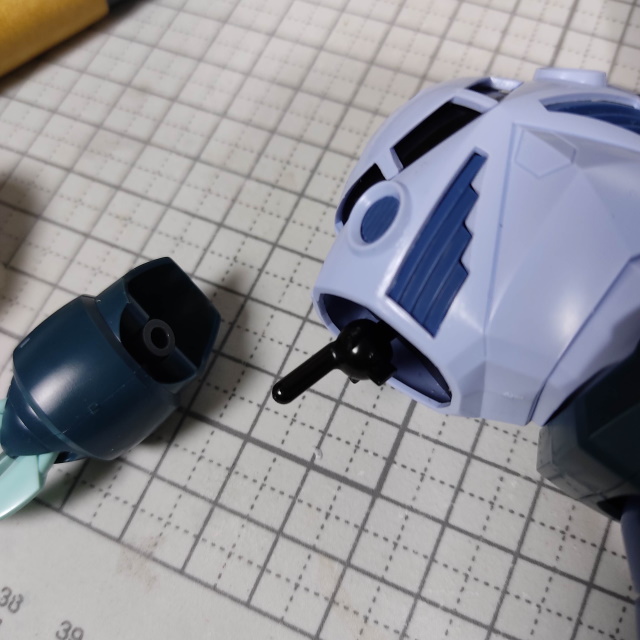
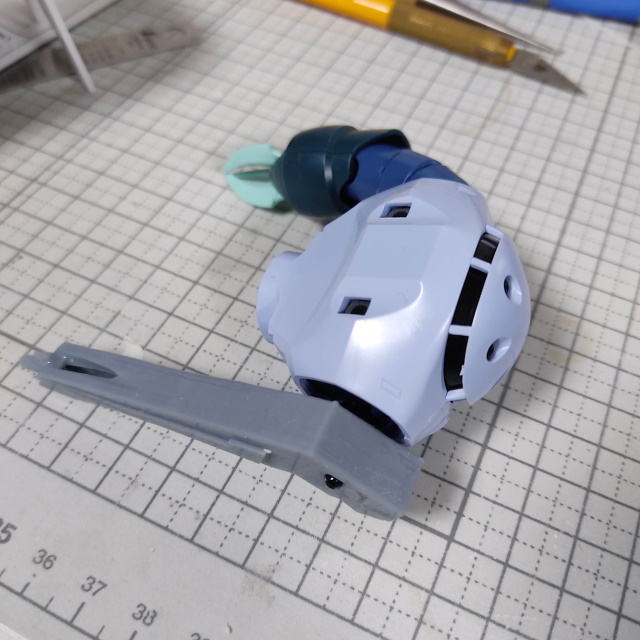
右腕の固定は、HGズゴックの腕関節のパーツを流用して、肩に取り付けるようにしました。
印刷した右腕パーツには3ミリの穴を空けておいて、腕関節パーツの棒が入るようにしています。
後はズゴックの上半身に固定して完成です。
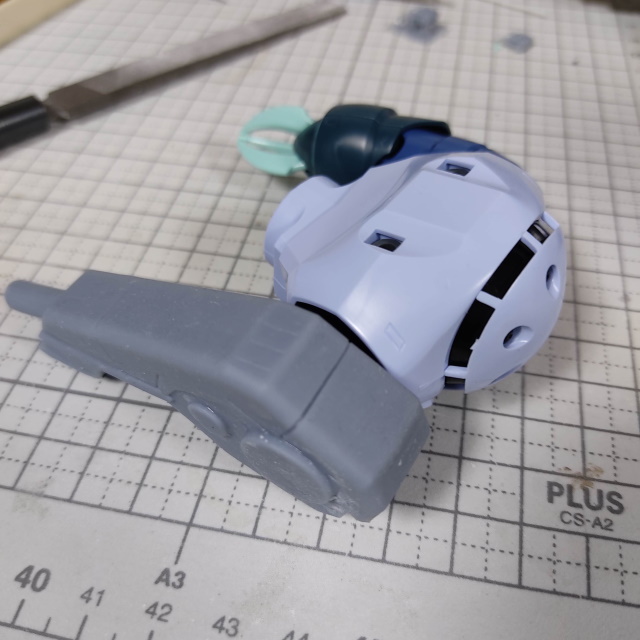
キットの関節部品を流用しているので、しっかりと固定することができます。

こんな感じで、ズゴックの装備強化仕様としても十分使えます(笑)

まとめ
「DesignSpark Mechanical」を使って、サイズ確認用の試作と設定資料を設計画面に取り込んで修正することができます。
サイズ感も分からない場合には、適当な印刷物を造形して現物合わせするような場合に有効な方法です。
成功した造形物は、インスタやツイッターに先にアップするので、よかったらご覧ください(フォローもしていただければ喜びます)
次回は、下半身(ダイブ・マヌーバー・ユニット)を3Dプリンターで印刷したいきます。
スポンサーリンク
最後までご覧いただき、ありがとうございます。