光造形 3Dプリンター「ELEGOO MARS PRO」を使って、1/144 モビルダイバーシステム ゼーゴックを作っていきます。今回はダイブ・マヌーバー・ユニットに取り付けられている方向舵の部分を造形していきます。
光造形 3Dプリンター ELEGOO MARS PRO
フィラメントのPLA樹脂などを利用する3Dプリンターが有名ですが、ELEGOO MARS PROは紫外線硬化するレジンを使って、造形物を印刷するプリンターです。PLA樹脂を使うプリンターよりも細かな造形ができるので、練習材料に機動戦士ガンダム MS IGLOOで登場する「モビルダイバー ゼーゴック」を製作していきます。


右腕(センサーユニット)のディティールアップ
ゼーゴックの制御ユニットとしてズゴックの上半身が流用されていますが、右腕は各種センサーに換装されているので、3Dプリンターで造形したパーツを取り付けていきます。
右腕の造形については別記事をご覧ください。
先回までの製作でセンサー部分を流用パーツを使ってディティールアップしてきました。
今回は、塗装した右腕パーツをズゴックの上半身に取り付けていきます。
先端を差し色に塗装
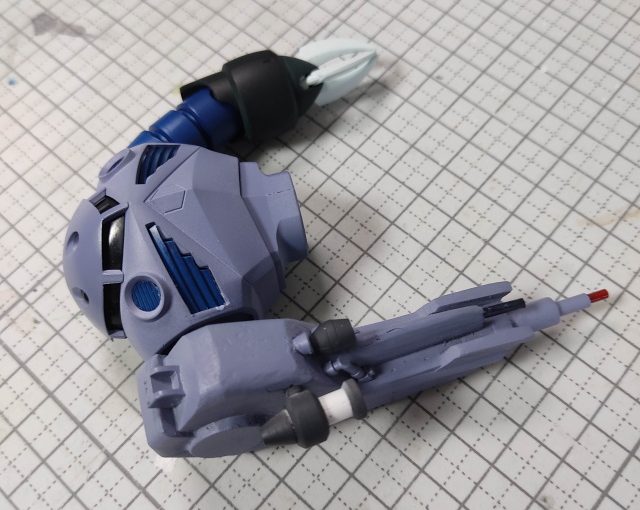
3D プリンターで造形したパーツをベースにして、ジャンクパーツを取り付けて仕上げた右腕パーツを組み立てていきます。センサー部分の突起は、ガンダムマーカーを使って黒く塗り分けを行いました。
細かな部分の筆塗りは手間と後片づけを考えると、ペンタイプの方が効率が上がります。塗り面積も小さいのでムラも気になりません。
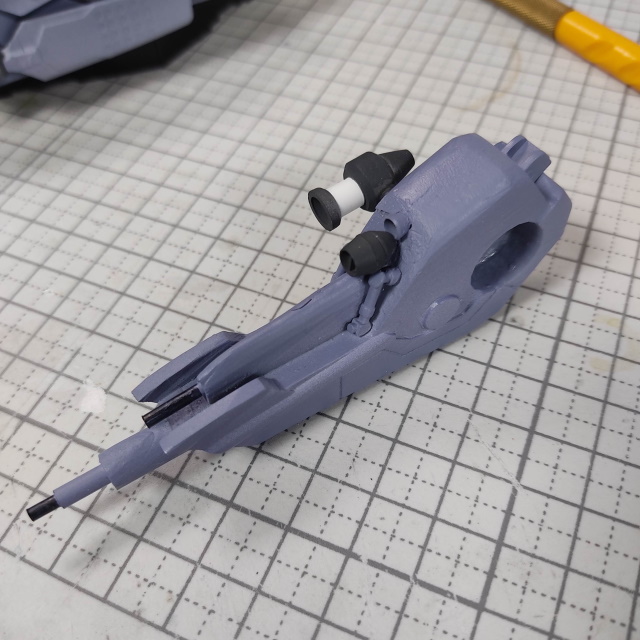
スコープのような形状の部品は、ジャーマングレイで塗装する際にマスキングテープで白のサーフェイサーのままになるように塗り分けをしました。
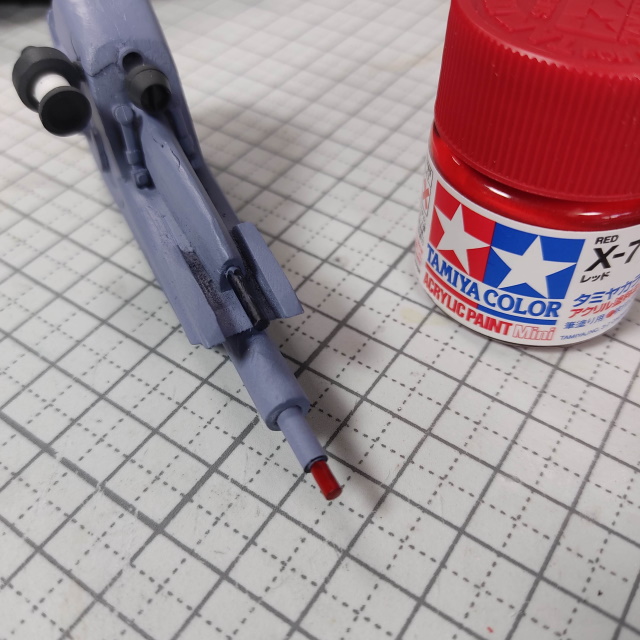
プロポーションの確認で、OVAを見直すとセンサー部分の先端は赤色になっていたため、タミヤカラーのレッド(X-7)を筆塗りして再現しました。
差し色として目立つように艶有りの赤色にしてあります。
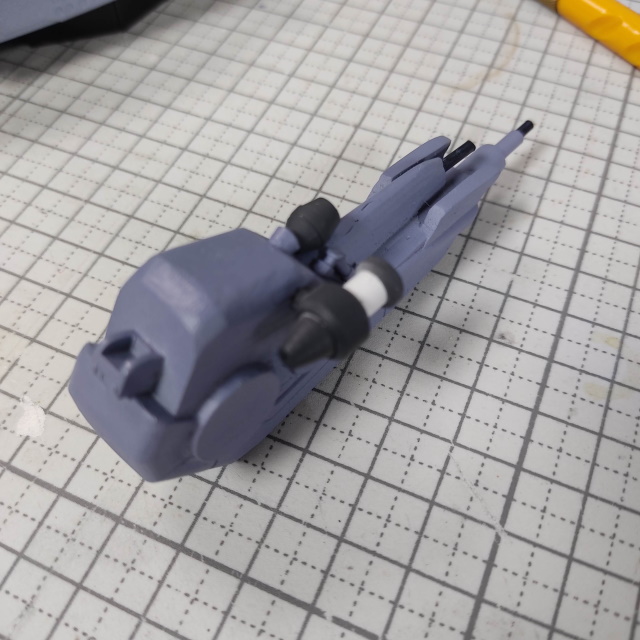
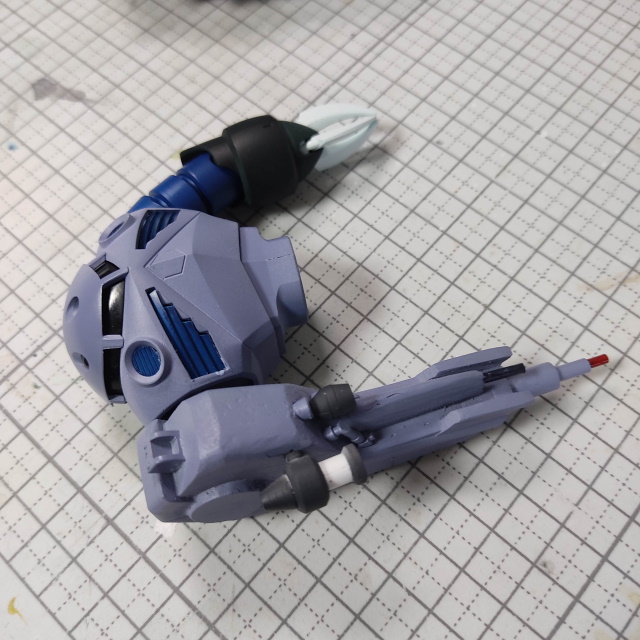
ズゴックの右腕関節のパーツを取り外して、腕の先端のパーツを肩にハメてセンサー部品を取り付けます。センサーパーツ側には3ミリ径の穴を設置してあります。

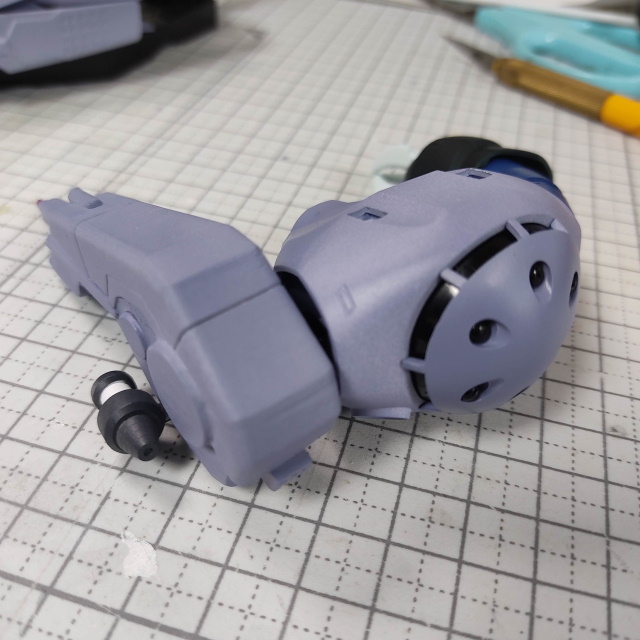
ズゴックの上半身に取り付けると、こんな感じ。接着しないので、後でズゴックとして組み直すこともできます。
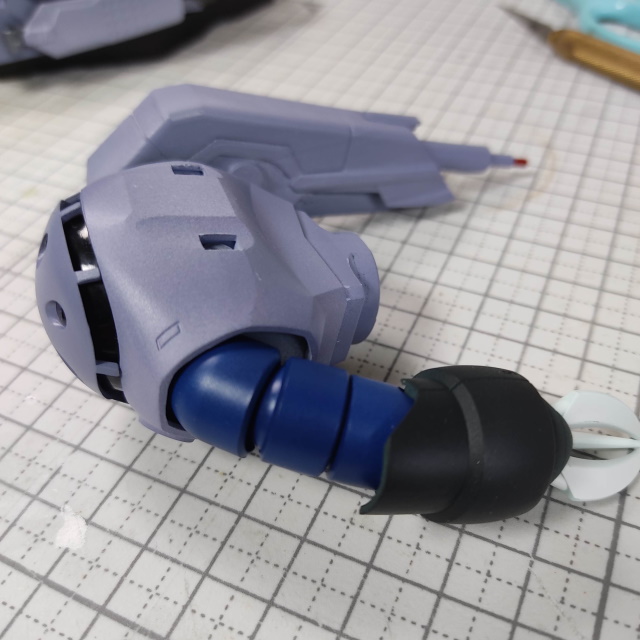
ゼーゴックの場合、ズゴックの前側はほとんど見えなくなります。
赤色で塗り分けた部分の面積が少ないので差し色として生かせてません(笑)
まとめ
今回は、ズゴック・ユニットの右腕の取付けを行いました。光造形の3Dプリンターで造形したパーツをベースにジャンクや社外品のディティールアップパーツを使って仕上げています。
プラ板での工作だと複雑なパーツを作るのは至難の作業ですが、3Dプリンターがあれば設計さえできれば、簡単に造形をすることができるので、スクラッチする作業時間が圧倒的に少なくすることができます。
成功した造形物は、インスタやツイッターに先にアップするので、よかったらご覧ください(フォローもしていただければ喜びます)
次回は、ズゴックのバックパック部分の組立てをしていきます。
スポンサーリンク
最後までご覧いただき、ありがとうございます。